olive™ EdgeROS
The Universal ROS On Module
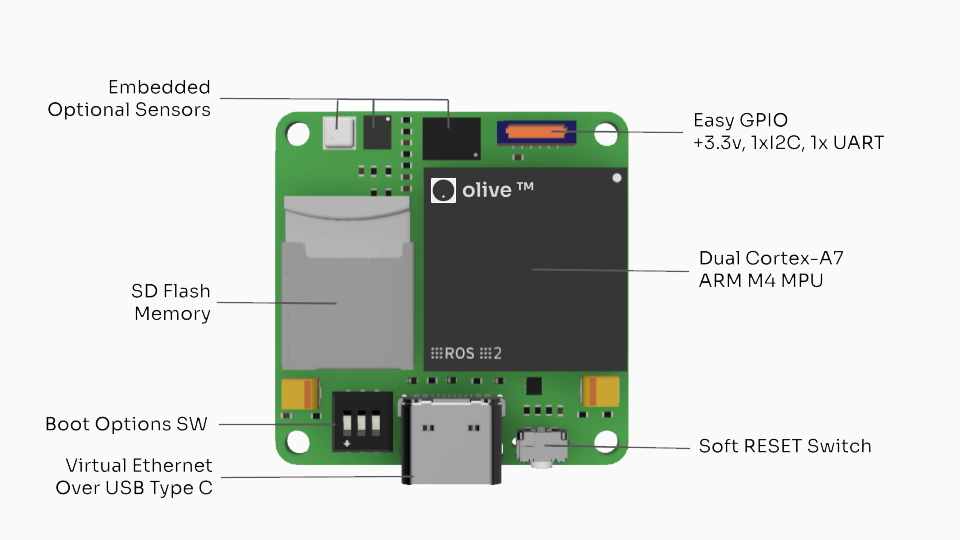
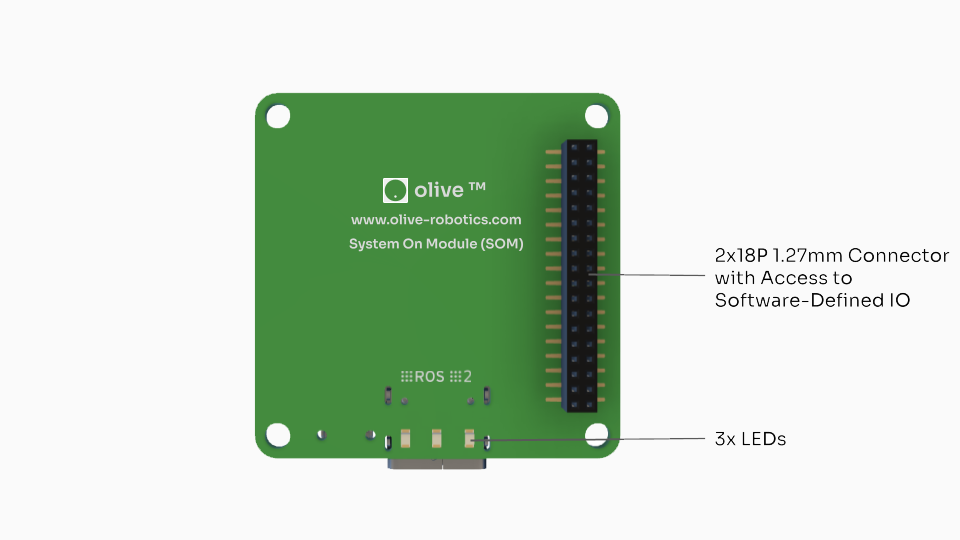
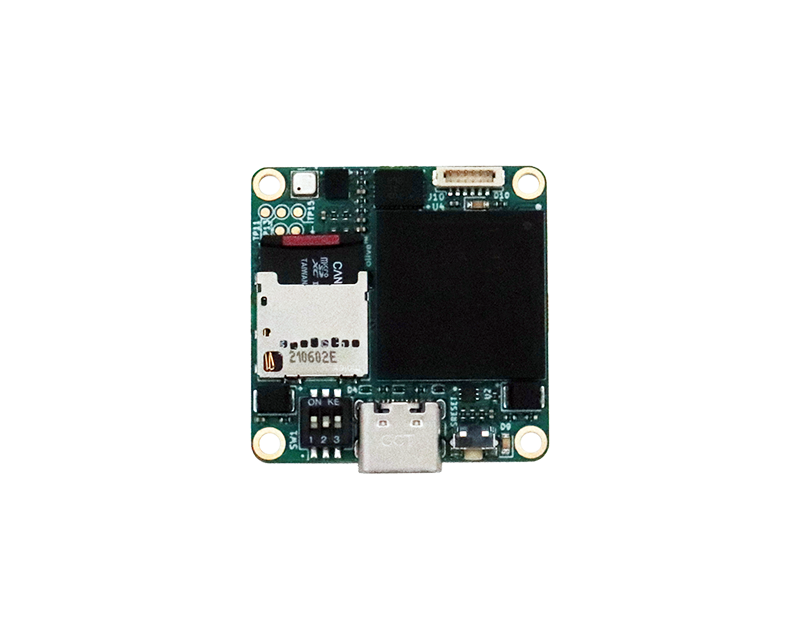
olive™ EdgeROS is a robotics optimized System on Module (SOM) that weighs only 5 grams, is capable of running both ROS and ROS 2 simultaneously and is the key to building high-performance, industry-leading software-defined robot hardware components.
- 5 grams
- 32 mm x 32 mm footprint
- ROS and ROS 2 support
- Production-grade software stack and OS included
- Debian-based Linux with real-time kernel included
- Tensor Processing Unit (TPU) the "AI Accelerator" available
*olive™ EdgeROS can also be purchased in batches
Buy olive™ EdgeROS dev kit Datasheet

 ROS 2.0:
Customized for Real-Time systems and industrial use cases
ROS 2.0:
Customized for Real-Time systems and industrial use cases
 AI Accelerator:
Up to 4 Trillion Operations Per Second Real-Time AI inference using CORAL AI accelerator
AI Accelerator:
Up to 4 Trillion Operations Per Second Real-Time AI inference using CORAL AI accelerator
 RT Linux:
Real-Time production-grade software stack and operating system
RT Linux:
Real-Time production-grade software stack and operating system
 Reconfigurable I/O:
Interfaces with USB, CAN, I2C, RS485, EtherCAT, and others
Reconfigurable I/O:
Interfaces with USB, CAN, I2C, RS485, EtherCAT, and others
 Software-Defined:
Multi-Protocol Interface Control Algorithms, Fusion, and Filtering
Software-Defined:
Multi-Protocol Interface Control Algorithms, Fusion, and Filtering
 Security:
Encryption, Authentication Integrity, Hacker-Powered
Security:
Encryption, Authentication Integrity, Hacker-Powered
 Ethernet:
RNDIS Networking Standard Ethernet over USB Low-Latency Communication
Ethernet:
RNDIS Networking Standard Ethernet over USB Low-Latency Communication
 Web Wizard:
Integrated web interface wizard
Web Wizard:
Integrated web interface wizard