Learn, build and grow in robotics with Olive™ hardware.
Create robots intuitively while aligning with industry standards.
RE-PROGRAMMABLE
REAL-TIME
INTEROPERABLE
PLUG & PLAY
ROS & ROS 2-NATIVE
Ehternet USB-C
Main Features
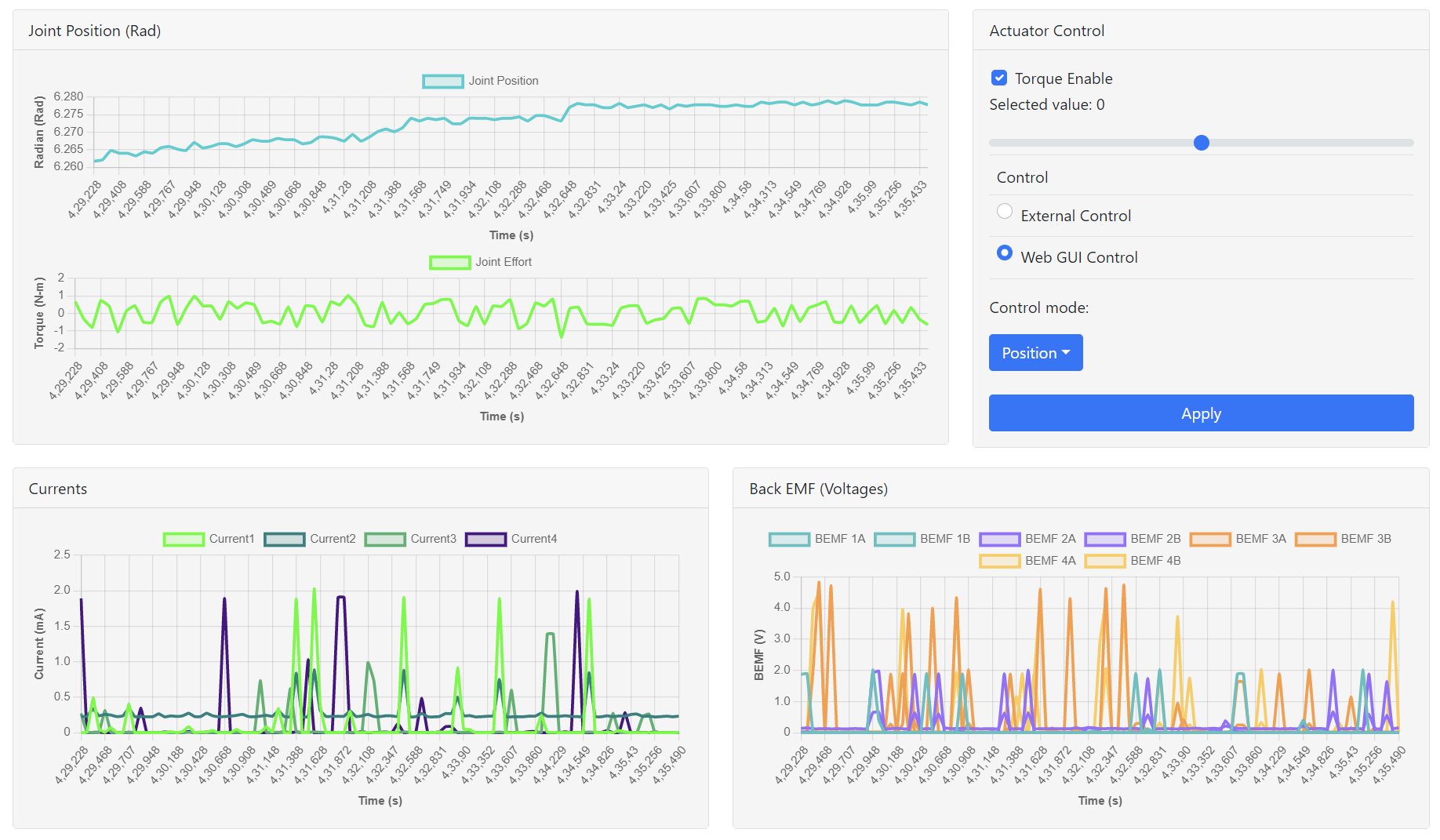
WebGUI: The Olive embedded web-based GUI is a user-friendly interface for
configuring, controlling, and testing out our modular robotic building blocks. It provides a
wide range of capabilities for setting up and controlling our hardware components, including
setting parameters, sending commands, and visualizing sensor data. It also offers an Integrated
Development Environment (IDE) that is based on the JupyterLab platform. It allows users to
manage embedded files on the device, create projects, write Python or C++ based embedded
applications, and run them on the modules.
Daisy Chain Technology: Leveraging the Power Delivery (PD) protocol in our
daisy chain configuration offers a transformative approach to device interconnectivity. PD
ensures seamless data and power transfer across the chain, allowing devices to negotiate optimal
power levels dynamically. This results in a consistent and reliable power distribution, ensuring
that each device in the sequence operates at its peak performance. The bi-directional capability
of PD also permits devices in the chain to both supply and receive power as required, leading to
a more efficient and integrated setup. This advanced protocol greatly enhances the versatility
and efficiency of our daisy chain system, ensuring smooth inter-device communication without the
complications of inconsistent power distribution.
Integrated Sensors: The servo is equipped with a diverse array of sensors,
encompassing an IMU (Inertial Measurement Unit), back EMF detection, effort sensing, a digital
encoder, and current measurement capabilities. This comprehensive suite of sensors offers a
multifaceted feedback system, allowing control algorithms to access a wealth of real-time data.
As a result, the algorithms can finely tune the servo's performance, adapting dynamically to
various conditions and requirements. This ensures not only precise movement and positioning but
also maximizes efficiency, leading to optimized behavior tailored to the task at hand.
ROS/ROS 2 Native: Embracing the advancements of modern sensor technology, our
Servo offers native support for ROS2 (Robot Operating System 2). This essentially means that the
Servo is driverless, eliminating the need to install and run a separate ROS2 node on your host
computer. By sidestepping this additional layer of software, not only is the system latency
minimized, but the throughput of data is also optimized to its maximum potential. This direct
integration ensures that data flows seamlessly and promptly from the sensor to the system.
Furthermore, the native ROS2 capability makes the Servo truly plug-and-play, streamlining
integration processes and enhancing user experience, especially in dynamic environments where
rapid deployment and configuration are crucial.
A universal robot servo motor
Modular. Software-defined. ROS and ROS 2-native
olive™ SERVO is a revolutionary modular robot servo motor that allows
you
to build any robot fast and easily.
Real-time kernel:
A real-time kernel offers deterministic response times, making it
essential for consistent data acquisition. Its optimized nature minimizes system
latencies, ensuring timely processing in critical applications. This
predictability
is key to avoiding unexpected delays or interruptions.
ROS & ROS 2 Native:
This essentially means that the Servo
is
driverless, eliminating the need to install and run a separate ROS2 node on your
host computer.
PD
Support:
Leveraging the Power Delivery (PD) protocol in our daisy chain
configuration offers a transformative approach to device
interconnectivity.
Digital Encoder:
Digital Encoder uses magnetic sensing
with feedback rates up to 4 kHz, ensuring precise motor position monitoring.
This high-frequency feedback leads to enhanced, smooth motor control,
adapting
swiftly to various operational demands.
Olive™ Servo has built-in ROS capabilities. The Robot Operating System (ROS) is an
open-source
framework that enables developers to easily
create, manage, and integrate robot hardware components. It is widely used in the robotics
industry, and is considered a crucial tool for anyone working in the field of robotics. ROS
provides a common set of tools and libraries that can be used to develop and control robot
hardware, making it possible for hardware components from different manufacturers to work
together seamlessly. This is particularly important for the development of modular robots,
which are composed of multiple interchangeable parts. At Olive Robotics, we use ROS and ROS
2
to develop and control our robot hardware components, enabling us to create advanced,
modular
robots that are easy to program and customize.
olive™ components is designed to be easily integrated into any
robotics
system, thanks to its plug and play design. This means that it can be easily
connected
to a computer or control system using a simple USB-C interface, without the need for
complex wiring or configuration.
In addition, olive™ component is natively compatible with ROS, Gazebo and all of its
ecosystem of tools. This allows users to easily incorporate Olive™ components into
ROS-based
projects in an accelerated manner.
Applications
Empowering everyone to sense motions, reliable, plug and play
Robotic Agriculcture
Robotic Warehouse
Robotic Inspection
Indoor Service Robots
Teleoperation
DIY Prosthetics
DIY Robotics
Delivery Robots
Manipulators
Lab Automation
Industrial Automation
Humanoid Robots
3D Printers
Education
Camera Gimbals
Drones
TECH SPECS
Form Factor
Dimensions (W x H x D)
Weight
60mm x 60mm x 48mm
360 grams
Processor Unit
Application Processor
Real-Time Processor
Dual Cortex-A7 up to 800 MHz
Cortex-M4 MPU up to 200 MHz
Memory
On Chip (SoC)
On Chip EEPROM (SoC)
On SOM
512 MB RAM
512 Bytes x 8
64 GByte SD Flash
Connectivity
High-Speed Connectivity
1x Virtual Ethernet USB Type C (up to 0.5 Gbps)
1x USB Type C (Daisy Chain Host)
Other I/O
1x User Switch
3x User LEDs
Software
Yocto BSP available for batch purchases
Linux Kernel
Operating System
Communication middleware
Robotic Operating Systems
Linux 5.10
Debian 11
Apache Cyclone DDS
ROS Noetic Ninjemys, ROS 2 Humble Hawksbill
Power, Mechanical, and Thermal
Power Consumption
Voltage
Max Current
Rotation Range
Max Speed
Stall Torque
Backlash
Sensors
Temperature Range
USB Type C PD <30W (65 W max)
PD 5.0v/9.0v/12.0v/15.0v/20.0v
5000mA
0-360 degrees
0.17 seconds/60 degrees
2.4 [N.m] (at 12[V], 2.2 [A])
20 [arcmin] (0.33 [°])
0.02 degrees (14-Bit [pulse/rev]) / 4x BEMF / 4x Current Sense
Commercial 0°C to 85°C / Industrial -40°C to +85°C
Form Factor
Dimensions (W x H x D)
60mm x 60mm x 48mm
Weight
360 grams
Processor Unit
Application Processor
Dual Cortex-A7 up to 800 MHz
Real-Time Processor
Cortex-M4 MPU up to 200 MHz
Memory
On Chip (SoC)
512 MB RAM
On Chip EEPROM (SoC)
512 Bytes x 8
On SOM
64 GByte SD Flash
Connectivity
High-Speed Connectivity
1x Virtual Ethernet USB Type C (up to 0.5 Gbps)
1x USB Type C (Daisy Chain Host)
Other I/O
1x User Switch
3x User LEDs
Software
Yocto BSP available for batch purchases
Linux Kernel
Linux 5.10
Operating System
Debian 11
Communication middleware
Apache Cyclone DDS
Robotic Operating Systems
ROS Noetic Ninjemys, ROS 2 Humble Hawksbill
Power, Mechanical, and Thermal
Power Consumption
USB Type C PD <30W (65 W max)
Voltage
PD 5.0v/9.0v/12.0v/15.0v/20.0v
Max Current
5000mA
Rotation Range
0-360 degrees
Max Speed
0.17 seconds/60 degrees
Stall Torque
2.4 [N.m] (at 12[V], 2.2 [A])
Backlash
20 [arcmin] (0.33 [°])
Sensors
0.02 degrees (14-Bit [pulse/rev]) / 4x BEMF / 4x Current Sense
Temperature Range
Commercial 0°C to 85°C / Industrial -40°C to +85°C
 Real-time kernel:
A real-time kernel offers deterministic response times, making it
essential for consistent data acquisition. Its optimized nature minimizes system
latencies, ensuring timely processing in critical applications. This
predictability
is key to avoiding unexpected delays or interruptions.
Real-time kernel:
A real-time kernel offers deterministic response times, making it
essential for consistent data acquisition. Its optimized nature minimizes system
latencies, ensuring timely processing in critical applications. This
predictability
is key to avoiding unexpected delays or interruptions.
 ROS & ROS 2 Native:
This essentially means that the Servo
is
driverless, eliminating the need to install and run a separate ROS2 node on your
host computer.
ROS & ROS 2 Native:
This essentially means that the Servo
is
driverless, eliminating the need to install and run a separate ROS2 node on your
host computer.
 PD
Support:
Leveraging the Power Delivery (PD) protocol in our daisy chain
configuration offers a transformative approach to device
interconnectivity.
PD
Support:
Leveraging the Power Delivery (PD) protocol in our daisy chain
configuration offers a transformative approach to device
interconnectivity.
 Digital Encoder:
Digital Encoder uses magnetic sensing
with feedback rates up to 4 kHz, ensuring precise motor position monitoring.
This high-frequency feedback leads to enhanced, smooth motor control,
adapting
swiftly to various operational demands.
Digital Encoder:
Digital Encoder uses magnetic sensing
with feedback rates up to 4 kHz, ensuring precise motor position monitoring.
This high-frequency feedback leads to enhanced, smooth motor control,
adapting
swiftly to various operational demands.